Sensors
Robotont uses a Realsense D435i 3D camera, which provides a regular camera feed and a depth sensor.
The camera feed is launched automatically when the robot is turned on.
Displaying the camera feed
Establish an ssh connection between the robot and the PC as shown here: Setting up the PC
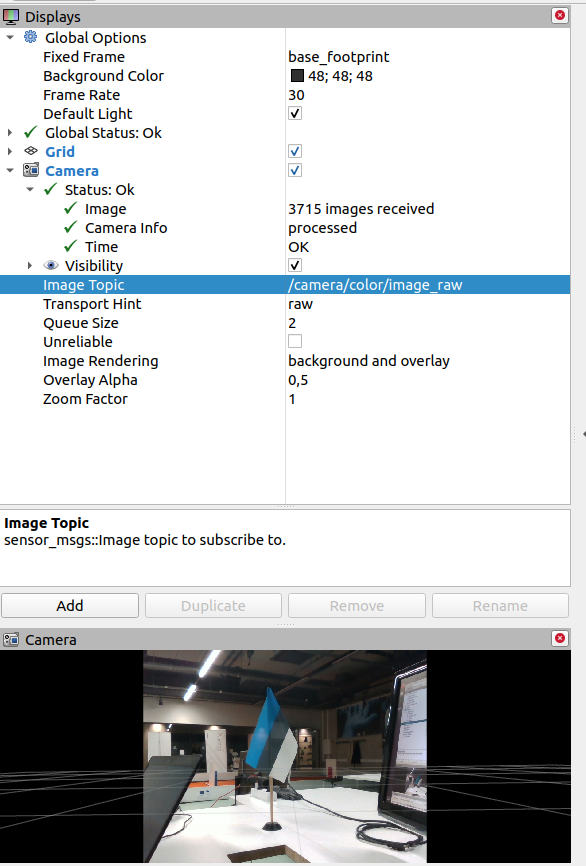
On the PC display the feed on RViz
roslaunch rviz rviz
Click on Add and select Camera. In the Camera topic field, select /camera/color/image_raw.
Getting distances from objects
Laserscan_to_distance node provides distances from the closest object from the left, the right and the middle.
To run laserscan_to_distance node on Robotont on-board computer
roslaunch robotont_laserscan_to_distance distance_from_depth_image.launch
To display the distances either on PC or on Robotont on-board computer
rostopic echo /scan_to_distance
