Demos on Robotont
Before running the demos it is necessary to get acquinted with the setup section of the documentation.
Before running the demos on the robot read the following instructions:
Note that some of the commands will run on Robotont on-board computer and some on user PC.
2D Mapping and Localization
The following are needed to run the 2D mapping demo:
sudo apt update sudo apt install ros-noetic-depthimage-to-laserscan sudo apt install ros-noetic-move-base
To run the 2D mapping demo, you need to clone the base package:
git clone https://github.com/robotont-demos/demo_slam.git
and choose a mapping method from the following:
Cartographer
Gmapping
Hector SLAM
Gmapping and AMCL
Installation
You can clone the package for the Gmapping method from this repository.
To clone the packages:
git clone https://github.com/robotont-demos/demo_slam_gmapping.git git clone https://github.com/robotont-demos/demo_teleop.git
Running the demo
On Robotont on-board computer or on PC launch 2d_slam.launch
roslaunch demo_slam_gmapping 2d_slam.launch
On PC launch 2d_slam_display.launch to visualize the result
roslaunch demo_slam 2d_slam_display.launch
To move the robot open another terminal window on robotont on-board computer or on the PC and run teleop twist keyboard (TBA)
roslaunch demo_teleop teleop_keyboard.launch
Hint
Notice that the teleop node only receives keypresses when the terminal window is active.
Cartographer
Installation
You can clone the package for the Cartographer method from this repository.
To clone the packages:
git clone https://github.com/robotont-demos/demo_slam_cartographer.git git clone https://github.com/robotont-demos/demo_teleop.git
Running the demo
On Robotont on-board computer or on PC launch 2d_slam.launch
roslaunch demo_slam_cartographer 2d_slam.launch
On PC launch 2d_slam_display.launch to visualize the result
roslaunch demo_slam 2d_slam_display.launch
To move the robot open another terminal window on robotont on-board computer or on the PC and run teleop twist keyboard (TBA)
roslaunch demo_teleop teleop_keyboard.launch
Hint
Notice that the teleop node only receives keypresses when the terminal window is active.
Hector SLAM
Installation
You can clone the package for the Hector SLAM method from this repository.
To clone the packages:
git clone https://github.com/robotont-demos/demo_slam_hector.git git clone https://github.com/robotont-demos/demo_teleop.git
Running the demo
On Robotont on-board computer or on PC launch 2d_slam.launch
roslaunch demo_slam_hector 2d_slam.launch
On PC launch 2d_slam_display.launch to visualize the result
roslaunch demo_slam 2d_slam_display.launch
To move the robot open another terminal window on robotont on-board computer or on the PC and run teleop twist keyboard.
roslaunch demo_teleop teleop_keyboard.launch
Hint
Notice that the teleop node only receives keypresses when the terminal window is active.
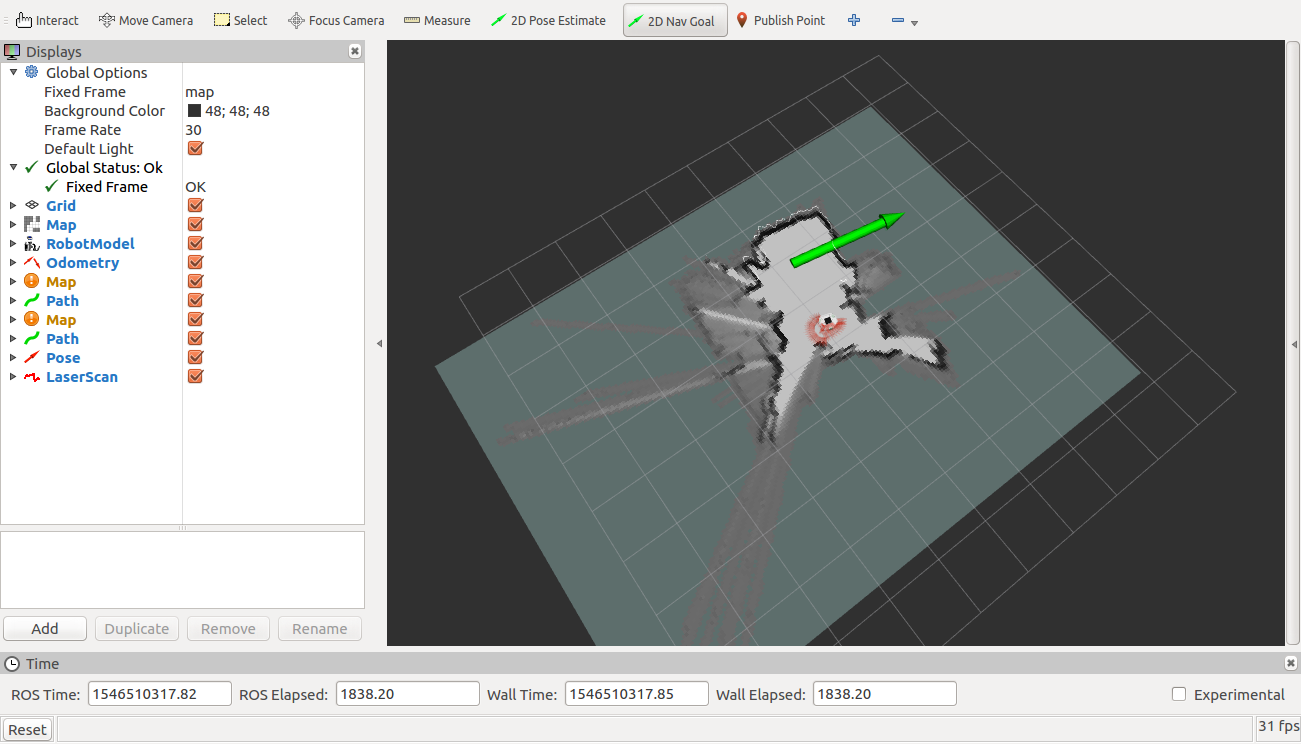
Setting 2D navigation goals
Using ROS Navigation to make the robot move autonomously is pretty straightforward. There are two GUI buttons in RViz to tell the robot where it is located (if it fails to accurately localize at startup) and where it needs to go.
For setting initial pose, click on 2D Pose Estimate and drag the arrow where and how the robot actually is.
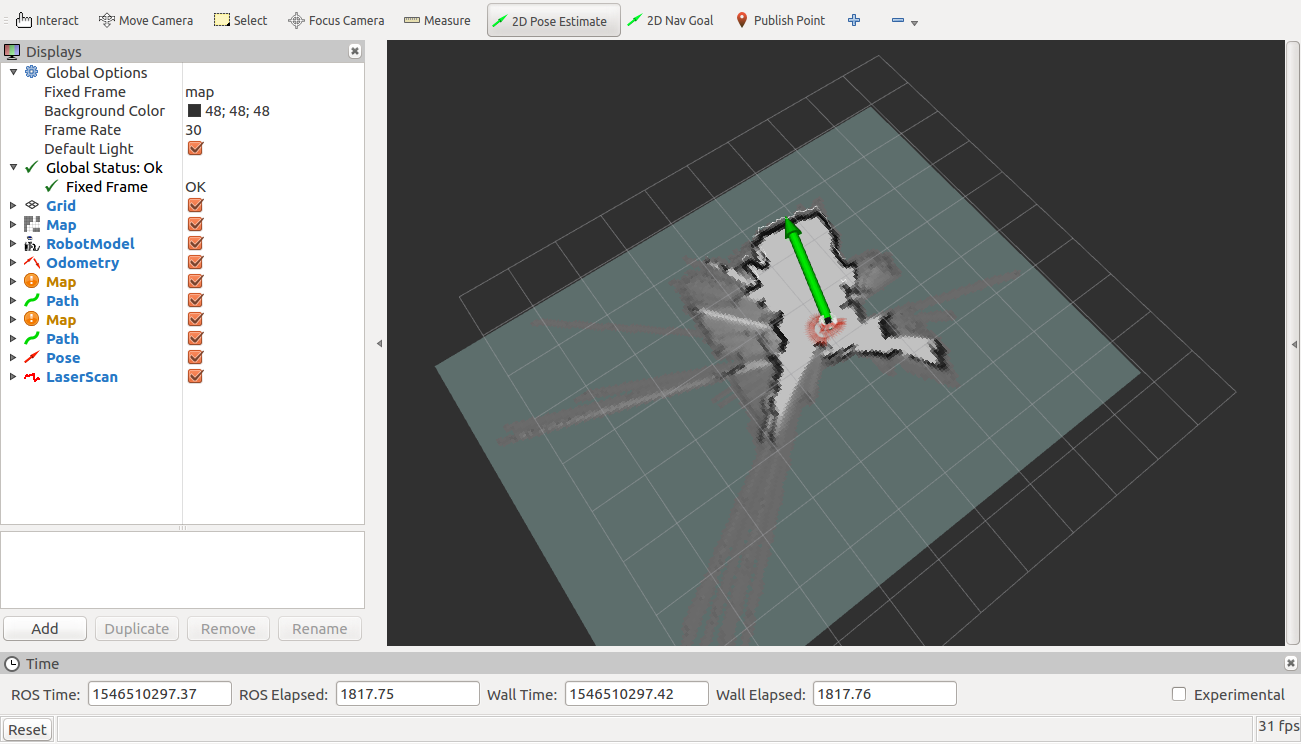
To tell the robot where to go, click on 2D Nav Goal and drag the arrow to where you want the robot to go and which way does it have to face.
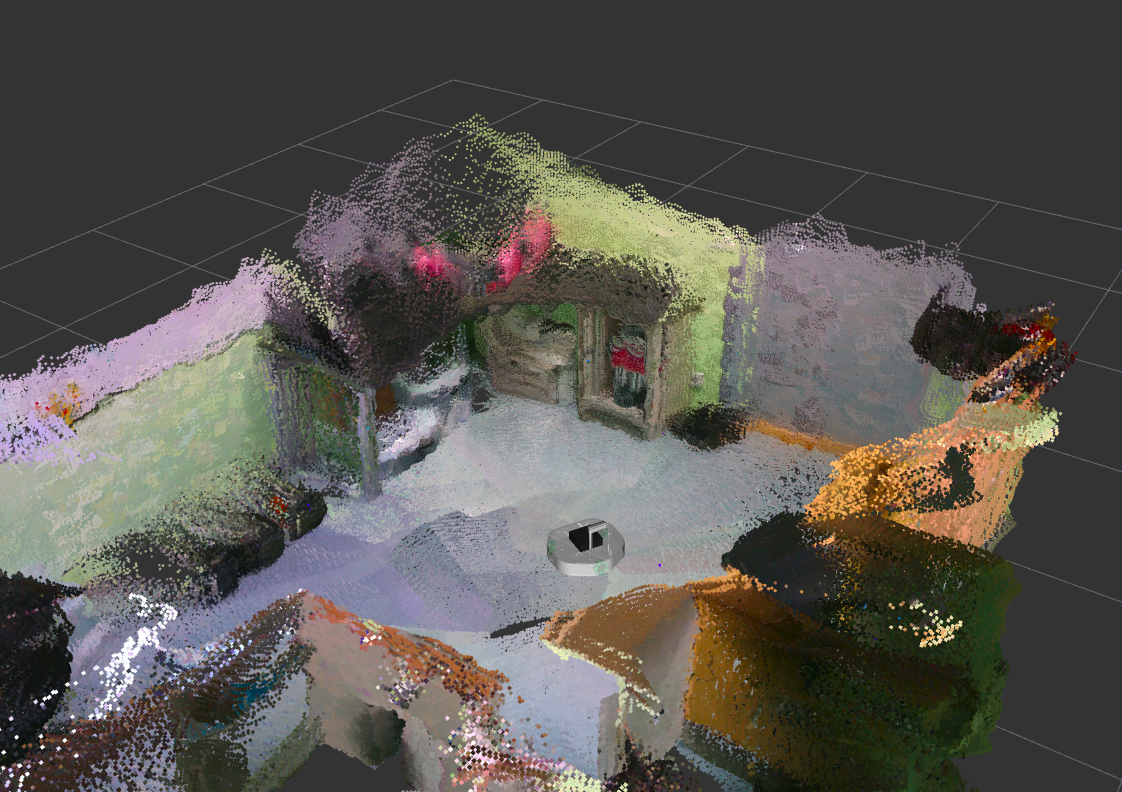
3D mapping
Creates a 3D map of the robot’s surroundings.
Installation
For 3D mapping:
sudo apt install ros-noetic-rtabmap-ros
and clone the following packages:
git clone https://github.com/robotont-demos/demo_mapping_3d.git git clone https://github.com/robotont-demos/demo_teleop.git
Running the demo
On Robotont on-board computer or on PC launch mapping_3d.launch
roslaunch demo_mapping_3d mapping_3d.launch
On PC launch mapping_3d_display.launch to visualize the result
roslaunch demo_mapping_3d mapping_3d_display.launch
To move the robot open another terminal window on robotont on-board computer or on user PC and run teleop twist keyboard
rosrun demo_teleop teleop_keyboard.launch
Hint
Notice that the teleop node only receives keypresses when the terminal window is active.
AR tracking
The robot identifies and tracks the pose of the provided AR tag and acts accordingly.
Follow the leader
The follow the leader demo showing the capabilities of the Robotont platform to detect and follow the AR Tag.
Installation
For AR tracking:
git clone https://github.com/machinekoder/ar_track_alvar.git -b noetic-devel git clone https://github.com/robotont-demos/demo_ar_follow_the_leader.git
Running the demo
On Robotont on-board computer or on PC launch ar_follow_the_leader.launch (change tag_nr with your AR tag number)
roslaunch demo_ar_follow_the_leader ar_follow_the_leader.launch marker_id:=tag_nr
On PC launch ar_marker_display.launch to visualize the result
roslaunch demo_ar_follow_the_leader ar_marker_display.launch
AR steering
The AR steering demo showing the capabilities of the Robotont platform to detect and follow the AR Tag.
Installation
For AR tracking:
git clone https://github.com/machinekoder/ar_track_alvar.git -b noetic-devel git clone https://github.com/robotont-demos/demo_ar_steering.git
Running the demo
On Robotont on-board computer or on PC launch ar_steering.launch (change tag_nr with your AR tag number)
roslaunch demo_ar_steering ar_steering.launch marker_id:=tag_nr
On PC launch ar_marker_display.launch to visualize the result
roslaunch demo_ar_steering ar_marker_display.launch
AR Maze
The AR maze demo showing the capabilities of the Robotont platform to detect and follow the AR Tag and navigate through the maze.
Installation
For AR tracking:
git clone https://github.com/machinekoder/ar_track_alvar.git -b noetic-devel git clone https://github.com/robotont-demos/demo_ar_maze.git
Running the demo
On Robotont on-board computer or on PC launch ar_maze.launch
roslaunch demo_ar_maze ar_maze.launch
Hint
Make sure to modify the list with ar tags for maze navigation in 8th line of ar_maze.launch: roslaunch demo_ar_maze ar_maze.launch marker_ids:=”4,10,5”