Controlling the simulated robot on RViz
Setup
Install teleop twist keyboard
sudo apt update sudo apt install ros-noetic-teleop-twist-keyboard
Start the driver
roslaunch robotont_driver fake_driver.launch
Set the fixed frame to
odomin RViz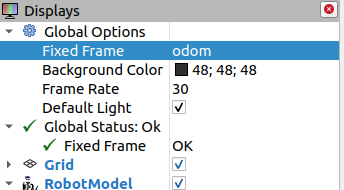
Controlling the robot using teleop twist keyboard
Open a new terminal window
Run the following command:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
Use the following keys to move the robot:
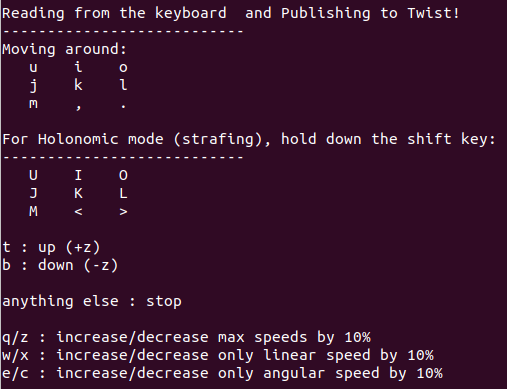
Hint
Notice that the teleop node receives keypresses only when the terminal window is active.
Tip
Use
CTRL + Cto stop the node.