Controlling the simulated robot in RViz2
Setup
Hint
Before installing any packages from apt, make sure existing packages are up-to-date:
sudo apt update && sudo apt upgrade -y
Hint
ROS packages installed from apt are only available in terminals where the ROS environment has been sourced. To use these packages, you must first source the general ROS 2 environment:
source /opt/ros/jazzy/setup.bash
Install teleop twist keyboard from apt:
sudo apt install ros-jazzy-teleop-twist-keyboard
Navigate to your colcon workspace:
cd ~/<your_colcon_workspace>/src
Clone the
robotont_driverpackage:git clone https://github.com/robotont/robotont_driver.git
Build the package:
colcon build --packages-select robotont_driver
Start the driver:
ros2 launch robotont_driver fake_driver_launch.py
Controlling the robot using teleop twist keyboard
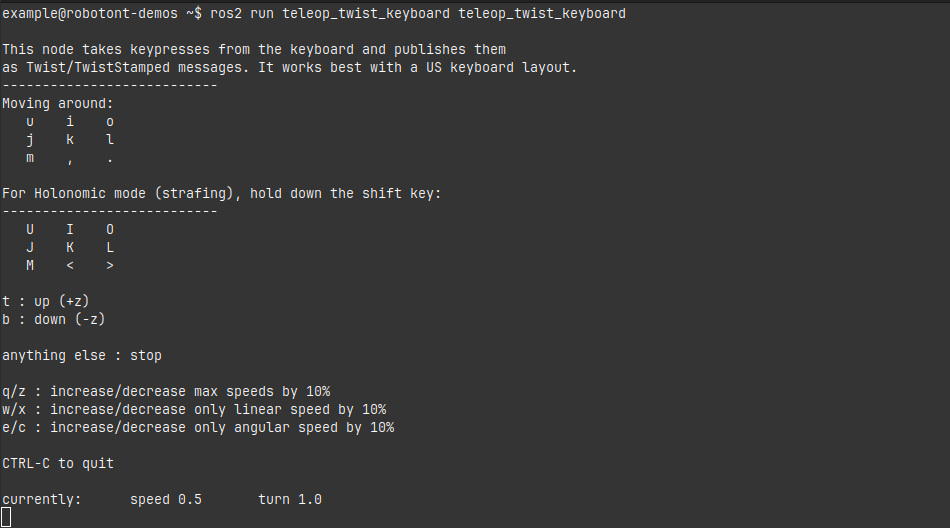
Start the
teleop_twist_keyboardnode:ros2 run teleop_twist_keyboard teleop_twist_keyboard
Use the following keys to move the robot:
Hint
Note that teleop only receives keypresses when the terminal window is active (in focus).
Tip
Use
CTRL + Cto stop the node.