Using only the simulated robot
This setup tutorial will guide you through setting up your PC to run the simulated robot with the demos.
Installing Ubuntu
Download Ubuntu image on your PC from the following link: Ubuntu 24.04.2 (Noble Numbat).
For installing Ubuntu on your PC, follow the guide Install Ubuntu Desktop.
Installing ROS
For installing ROS 2 Jazzy, follow the guide for Ubuntu (deb packages).
Creating a colcon workspace
Create a workspace for colcon as shown here.
Cloning Robotont’s packages
All Robotont’s packages can be accessed from Robotont’s GitHub.
Packages necessary to run the Gazebo simulation with Robotont’s demos are following:
You can find the demos from the following repositories:
See the Demos on Gazebo for more information about the demos.
To clone the packages, for example, robotont_description:
git clone https://github.com/robotont/robotont_description.git
Building the colcon workspace
cd colcon_ws
colcon build
Sourcing the workspace
Make the workspace visible to ROS 2 (must be done for every new terminal)
source ~/colcon_ws/install/setup.bash
For automatic sourcing:
echo "source ~/colcon_ws/install/setup.bash" >> ~/.bashrc
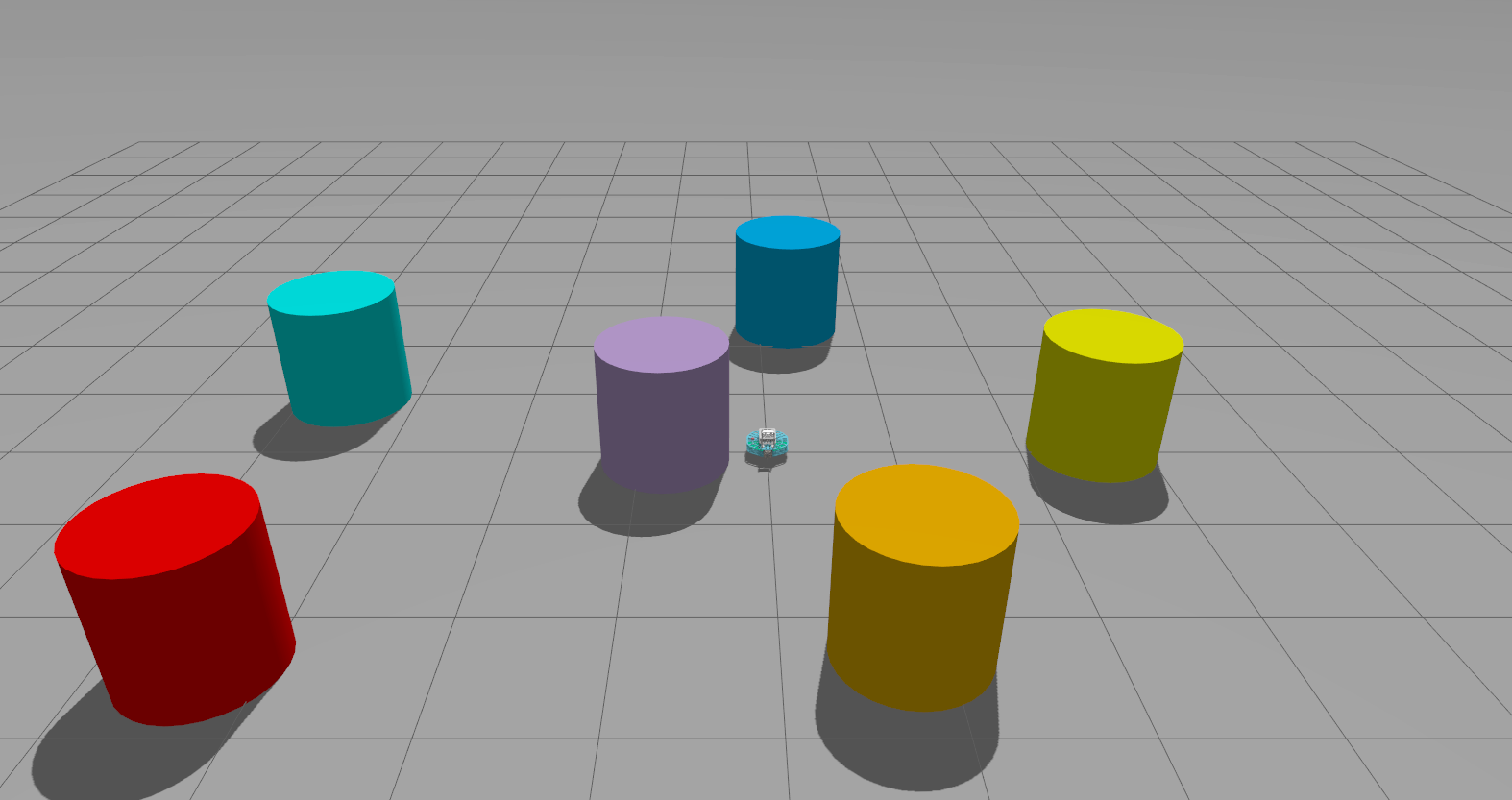
Running the Simulation
After building and sourcing your workspace, you can spawn the robot in a gazebo world, for example:
ros2 launch robotont_gazebo gazebo.launch.py world:=colors.sdf
Refer to individual demo package READMEs for more details on launching specific demos.